【五】FMCW角度测量
5/8/2026 | 3 minutes to read | Tags: 雷达信号处理, FMCW雷达, 英飞凌
阵列结构
通过查询BGT60TR13C的数据手册,我们可以发现这款毫米波雷达是L型阵列;水平方向2个RX垂直方向2个RX,可以同时测量水平角(Azimuth)和俯仰角(Elevation)。
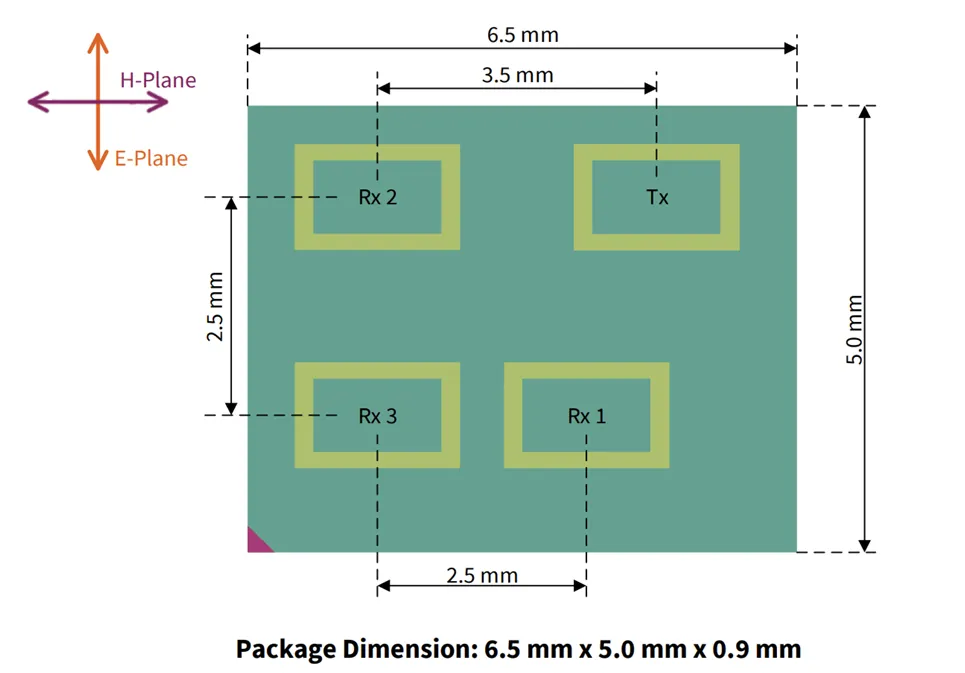
测角的本质是检测接收信号的相位变化,因此通过Rx1,Rx3的相位差可以得到水平角;Rx2,Rx3的相位差可以得到俯仰角。
单脉冲法
单脉冲法的核心逻辑是利用电磁波到达不同位置天线的时间差(即路程差)所导致的相位偏移来反推目标的方位。它专注于视野中最接近的运动物体,而不需要全空间的扫描,因此计算量小,适合部署到边缘设备中。
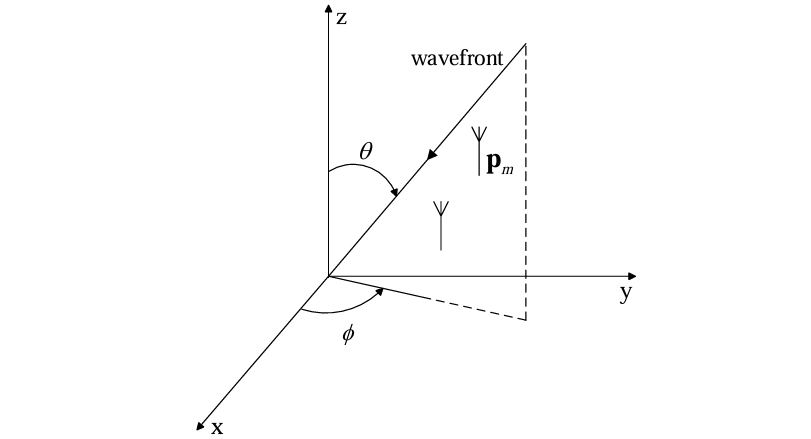
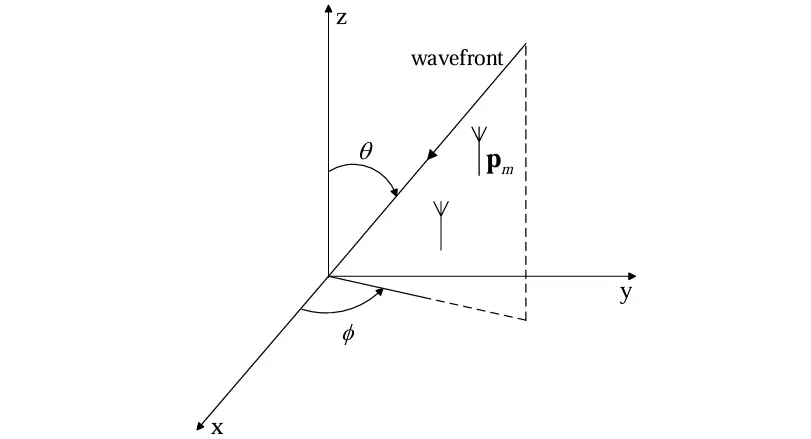
几何模型
假设有两个接收天线之间的间距为 。当远场目标以角度 入射时,到达两个天线的波程存在差异,即波程差为。而这个路程差在信号相位上表现为 。相位差与波程差的关系如下:
解得
因此可以得到求解角度的基本思路。
基本思路
- 在RD图中锁定目标点 后,提取对应的复数数据 和 。
- 利用复数共轭相乘来提取相位差:
- 应用 公式得到。
代码实现
由于RX3是水平角和俯仰角都需要的一个阵元,因此我们用它得到的RD图作为标准,检测最大值所在的坐标。
num_ant = 3 # 天线数量mti_alpha = 0.8 # MTI滤波器的平滑系数mti_history = np.zeros((config.num_chirps, config.chirp.num_samples, num_ant))
range_window = signal.windows.blackmanharris(config.chirp.num_samples).reshape(1, config.chirp.num_samples)doppler_window = signal.windows.blackmanharris(config.num_chirps).reshape(config.num_chirps, 1)
range_skip = 8
frame_contents = device.get_next_frame()frame_contents_squeezed = np.squeeze(frame_contents, 0)
ant_num = frame_contents_squeezed.shape[0]RD_map_all = np.zeros_like(frame_contents_squeezed, dtype=np.complex128) # 用于存储每个天线的RD图历史,供MTI使用doppler_peak_value = np.zeros((ant_num, 1), dtype=np.complex128) # 用于存储每个天线的峰值位置索引,供后续分析使用
doppler_peak_index = np.zeros(2, dtype=int) # 用于存储每个天线的峰值位置索引,供后续分析使用
# 得到三个RX的RD图 优先处理RX3,寻找峰值位置,后续RX1和RX2在该位置寻找对应的值进行角度计算for i_ant in range(ant_num - 1, -1, -1): mat = frame_contents_squeezed[i_ant, :, :]
# Step 1 - 去除杂波 data = mat - np.average(mat)
# Step 2 - MTI去除静态物体 data_mti = data - mti_history[:, :, i_ant] mti_history[:, :, i_ant] = data * mti_alpha + mti_history[:, :, i_ant] * (1 - mti_alpha)
# Step 3 - 计算RD图 doppler_fft = tools.fft_2d_spectrum(data_mti, range_window, doppler_window)
# Step 4 - 以RX3为参考天线,寻找峰值位置 if i_ant == 2: # 采用OS CFAR算法做目标识别 cfar_result = tools.os_cfar_2d(doppler_fft, guard_len=4, ref_len=4, rank=156, scale=1.5) after_cfar = cfar_result * doppler_fft
# 提取RX3最大值所在位置 doppler_peak_index = np.unravel_index(np.argmax(np.abs(after_cfar[:, range_skip:])), after_cfar[:, range_skip:].shape)
# Step 5 - 提取每个RX这个位置对应的复数值 doppler_peak_value[i_ant] = doppler_fft[doppler_peak_index[0], doppler_peak_index[1]+range_skip]
# Step 6 - 方位角计算delta_phi_1_3 = np.angle(doppler_peak_value[0] * np.conj(doppler_peak_value[2])) # 计算RX1和RX3的峰值之间的相位差delta_phi_2_3 = np.angle(doppler_peak_value[1] * np.conj(doppler_peak_value[2])) # 计算RX2和RX3的峰值之间的相位差
azimuth_arg = delta_phi_1_3[0] * wavelength_m / (2 * math.pi * d_m)elevation_arg = delta_phi_2_3[0] * wavelength_m / (2 * math.pi * d_m)
azimuth_arg = np.clip(azimuth_arg, -1.0, 1.0)elevation_arg = np.clip(elevation_arg, -1.0, 1.0)
azimuth_angle_rad = np.arcsin(azimuth_arg) # 水平方位角计算:根据相位差计算水平角度elevation_angle_rad = np.arcsin(elevation_arg) # 垂直方位角计算:根据相位差计算垂直角度
azimuth_deg = float(np.degrees(azimuth_angle_rad))elevation_deg = float(np.degrees(elevation_angle_rad))
print(f"Azimuth Angle: {azimuth_deg:.2f} degrees, Elevation Angle: {elevation_deg:.2f} degrees")未完待续。如果学了其它角度检测方法会及时更新。
← Back to blog