【〇】FMCW雷达信号处理
Frequency modulated continuous wave(频率调制连续波),也称为modulated continuous wave radar。
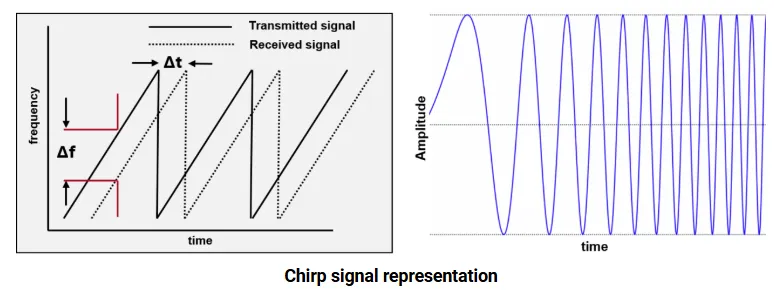
频率调制的过程中,传输电磁波的频率与时间线性递增。也就是说,传输频率将以恒定速率变化。这种频率随时间线性增加的信号被称为啁啾信号(Chirp)。
FMCW系统测量发射信号频率与反射信号频率之间的瞬时差异,即与时间差成正比反射的Chirp。时间差可用于计算目标的距离。
Chirp Signal
描述Chirp特征的是起始频率 带宽和持续时间 。Chirp的斜率决定了其加速的速度。
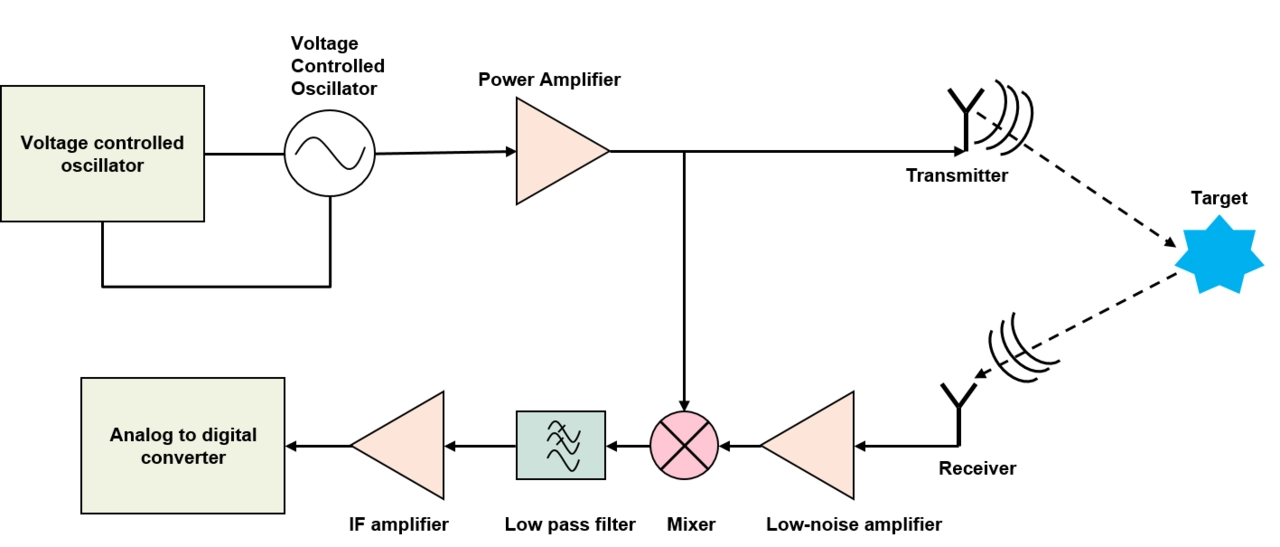
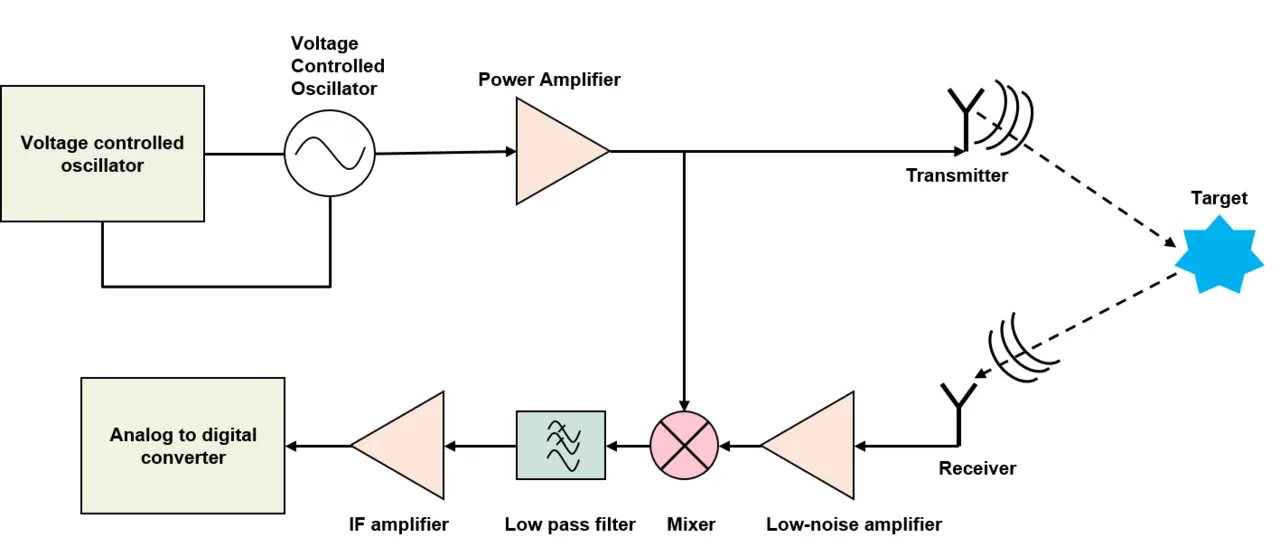
FMCW雷达系统的结构
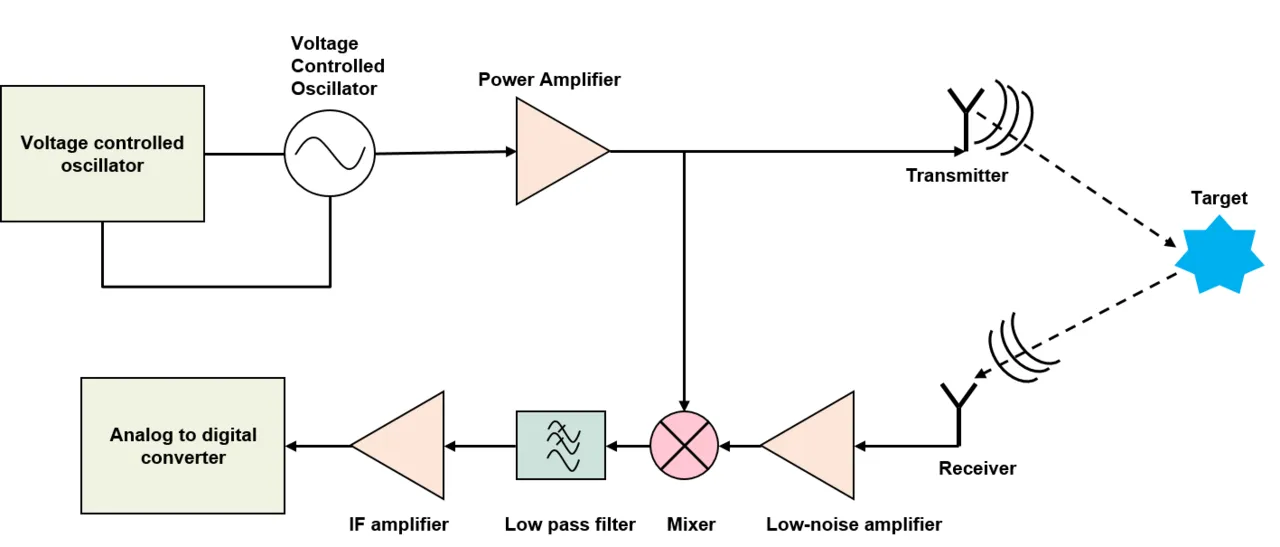
频率合成器和压控振荡器(VCO)共同在VCO的输出端产生了线性FMCW信号。生成的信号被分为两部分:一部分用作发射信号,另一部分信号被送到混频器,用于对接收天线接收到的放大信号进行下变频(down-convert,意思是将高频率的信号变为基带信号)。
FMCW雷达的特点:
- Ability to measure small ranges.
- Simultaneous measurement of both range and velocity information.
- Signal processing is performed at a low frequency range.
距离分辨率Range Resolution
雷达前方的一个目标会产生一个频率恒定的中频信号(IF Signal),其频率由以下公式给出:
d表示雷达与目标的距离;c是光速;S是Chirp的斜率,由带宽变化率除以Chirp持续时间得到:
其中B表示带宽(Hz),表示chirp的持续时间(s)。
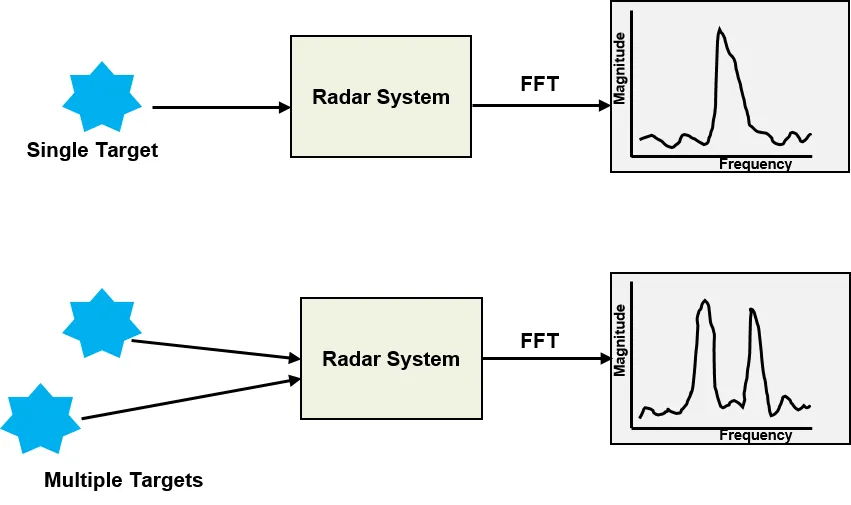
可以通过对IF进行FFT,得到幅度谱就可以提取出那个固定频率。
原DFT算法复杂度,使用FFT后复杂度降低到
将幅度谱随距离值变化的曲线绘制出来,就称为距离FFT图(Range FFT Plot)。如果雷达前方存在多个目标,中频信号的幅度谱会显示多个峰值,每个峰值的频率与目标到雷达的距离成正比。换句话说,峰值的位置直接对应于目标的距离。然而,如果目标彼此距离太近,它们在幅度谱上会显示为一个单一的峰值。这时就需要引入距离分辨率的概念:它是指雷达区分近距离目标的能力。
其中c是光速;其中B表示带宽(Hz)。
也就是说距离分辨率只取决于带宽:带宽越大,分辨率越好。但同时也必须注意的是,雷达系统的带宽必须符合美国联邦通信委员会(FCC)设定的标准,比如对于60GHz的雷达,带宽设定为7GHz;对于24GHz的雷达,带宽设定为250MHz。与此同时,中频带宽也受制于数模转换器(ADC)的采样频率:
因此雷达的最大测距距离为:
距离多普勒Range Doppler
两个与雷达距离相等的物体在距离FFT图中仍然会产生一个峰值,但事实证明,如果计算出目标的相位,则可以利用两个连续脉冲之间的相位差来估计目标的速度。因此,这些目标与雷达的距离可能相同,但它们的速度却可能不同。两个间隔为的脉冲可以测量的最大速度由以下公式给出:
为波长(m),PRT是是chirp重复时间(s)(有时也称为脉冲重复时间),它是两个chirp之间的间隔.
以英飞凌的 BGT60XX 雷达为例,由于它会生成快速Chirp信号,因此仅使用两个Chirp信号很难观察到相位变化,所以至少需要使用 8 个线性调频信号来提取相位信息。
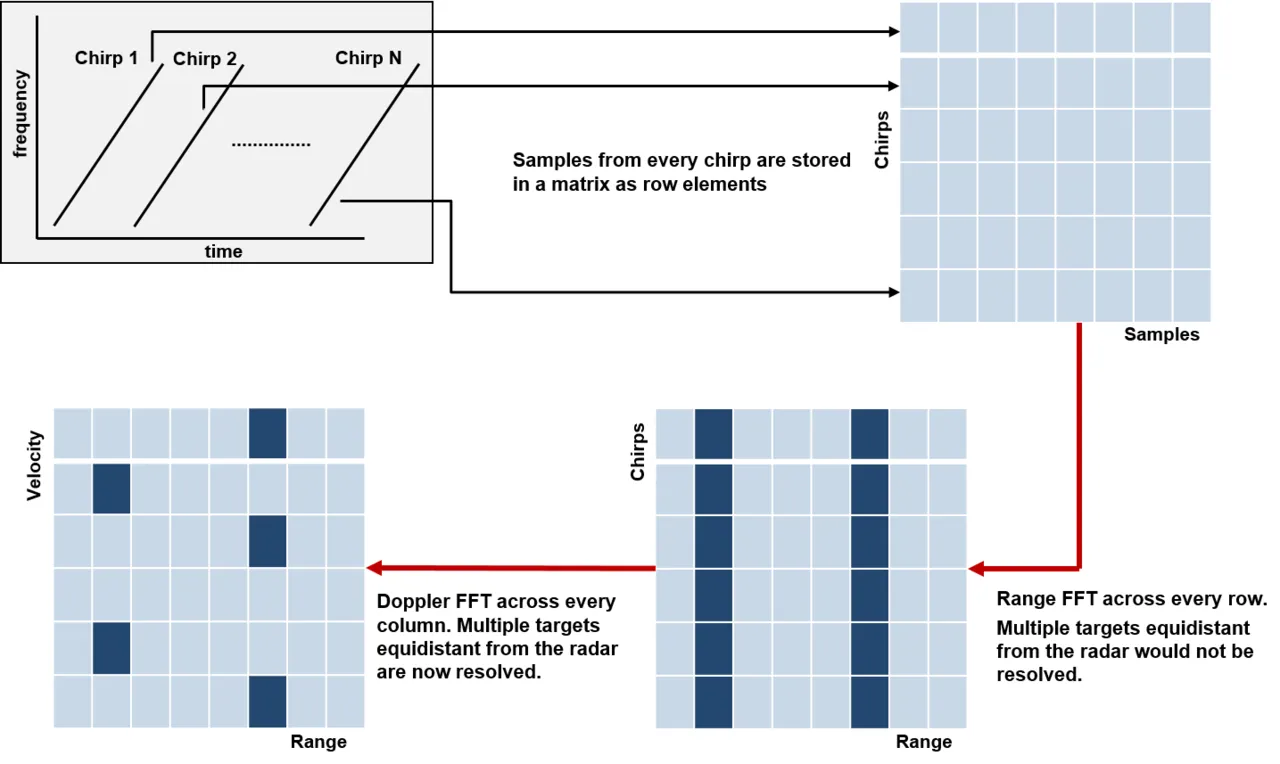
一般来说,如果发射并接收多个Chirp信号,则反射回来的信号可以存储为矩阵的行元素。对每一行或每一个啁啾信号进行快速傅里叶变换(FFT)相当于进行距离FFT。对列进行FFT可以分辨目标的径向速度,这种计算方法称为多普勒FFT。整个过程称为距离多普勒变换。
每一行表示一个反射回来的信号。
对每一行做FFT称为距离FFT(Range FFT)。
对每一列做FFT称为多普勒FFT(Doppler FFT)。
雷达参数解释(适用于英飞凌DEMO BGT60TR13C)
啁啾信号(Chirp)是一种频率随时间以恒定速率()变化(即增加或减少)的信号。在传输啁啾信号的过程中,接收天线接收到的信号会被模数转换器(ADC)主动采样,转换为数字波形,以便进行后续处理。
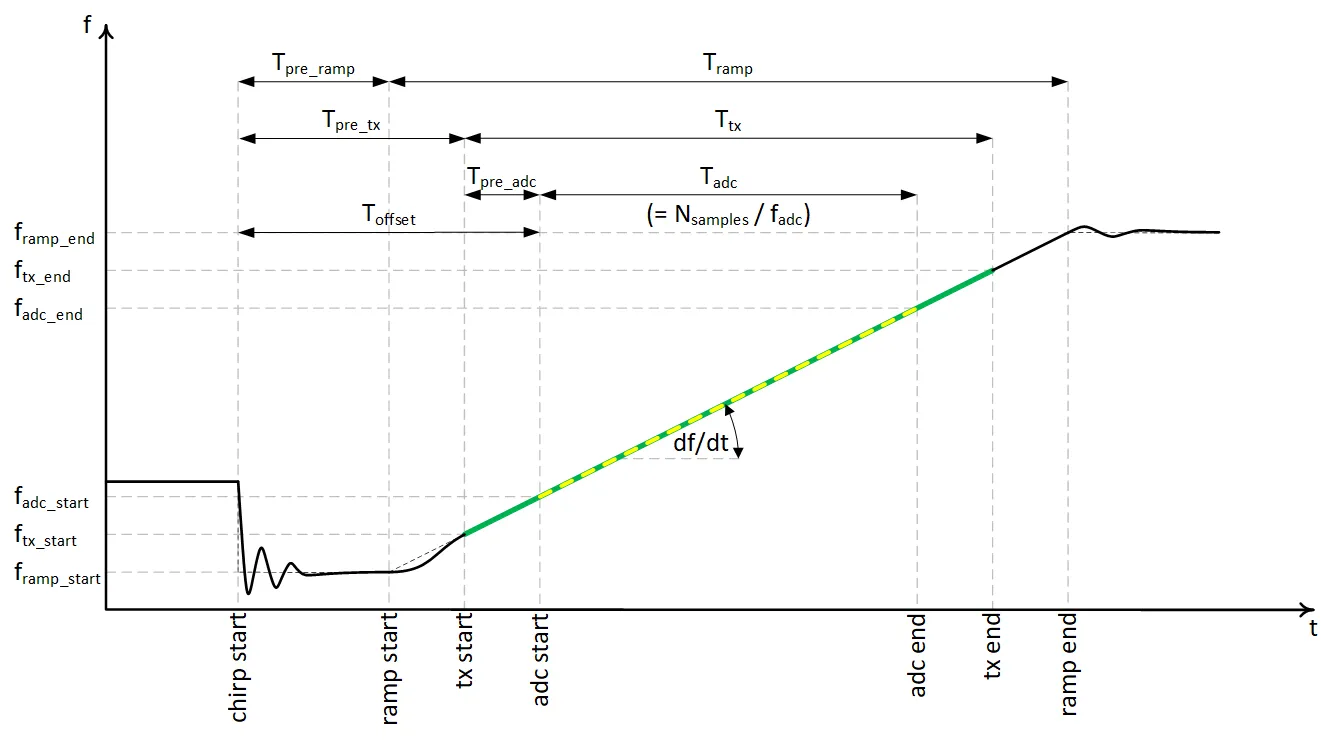
下面是Infineon RFS SDK使用的Avian配置结构参数对应图中参数的含义(还包括一些其他参数的介绍):
| Avian配置参数 | 符号 | 含义 |
|---|---|---|
| num_samples_per_chirp | 表示帧中每个chirp期间采集的样本数 | |
| start_frequency_Hz | 表示chirp的开始频率 | |
| end_frequency_Hz | 表示chirp的停止频率 | |
| sample_rate_Hz | ADC的采样率 | |
| chirp_repetition_time_s | 脉冲重复时间,表示是两个连续时间的间隔。 | |
| num_chirps_per_frame | 表示在一个测量帧中所包含的连续chirps的数量以及帧结束延迟(frame end delay) | |
| frame_repetition_time_s | 一个帧的周期 | |
| () | Chirp的总带宽 | |
| 中心频率, | ||
| 执行chirp的时间 | ||
| 连续chirp信号之间的空闲时间 | ||
| 帧率 | ||
| 波长, |
- 对于Avian雷达传感器,时间点和是一样的,频率点和也一样。
- c为光速,
雷达参数指标
- max_range_m: 最大距离(0到该值的范围)
- max_speed_m_s: 最大速度(从-max_speed_m_s到+max_speed_m_s)
- range_resolution_m: 距离分辨率,辨识相同速度的两个物体的最小距离差。
- speed_resolution_m: 速度分辨率,辨识相同距离的两个物体的最小速度差。 从此也可推导出以下表达式:
根据计算公式可以得到以下结论:
- 为了得到更远的测量距离,ADC采样率需要增加,代价是单个chirp持续时间会更长。最大距离也受信号从目标反射回雷达的强度所限制。
- 距离分辨率与雷达带宽成反比。(但注意分辨能力与雷达带宽成正比,因为距离分辨率越小分辨能力越强)
- PRT设置为多少由你想要检测的最大速度所决定。
- 设置为多少由你想要检测的最大速度和速度分辨率共同决定。
- 越大,PRT可设置的最小值就会变大,进而限制能检测到的最大速度。
- 越大,帧时间越长,检测帧率能设置的最大值就会变小。
假设中心频率,雷达带宽。波长为5mm。下面给出了一些例子。
| PRT() | (GHz) | (m) | (m) | (m/s) | (m/s) | 帧率Hz | ||
|---|---|---|---|---|---|---|---|---|
| 64 | 500 | 64 | 2 | 0.075 | 2.4 | 2.467 | 0.077 | 31.25 |
| 256 | 500 | 128 | 2 | 0.075 | 9.6 | 2.496 | 0.039 | 15.625 |
| 128 | 500 | 16 | 2 | 0.075 | 4.8 | 2.496 | 0.312 | 125 |
| 128 | 5000 | 256 | 2 | 0.075 | 4.8 | 0.2479 | 0.0019 | 0.78 |
参考文献
Infineon RFS SDK Documentation中Introduction to Radar部分。
← Back to blog